Interruptor de límite de émbolo con pasador sellado

-

Carcasa robusta
-

Acción confiable
-

Vida mejorada
Descripción del Producto
Los interruptores de límite miniatura de la serie RL8 de Renew ofrecen mayor durabilidad y resistencia a entornos hostiles, con una vida útil mecánica de hasta 10 millones de operaciones, lo que los hace ideales para aplicaciones críticas y de servicio pesado donde no se pueden utilizar interruptores básicos convencionales. Estos interruptores tienen un diseño de carcasa dividida, compuesto por un cuerpo de aleación de zinc fundido a presión y una cubierta termoplástica. La cubierta es extraíble para facilitar el acceso y la instalación. Su diseño compacto permite su uso en aplicaciones con espacio de montaje limitado.
Dimensiones y características de funcionamiento
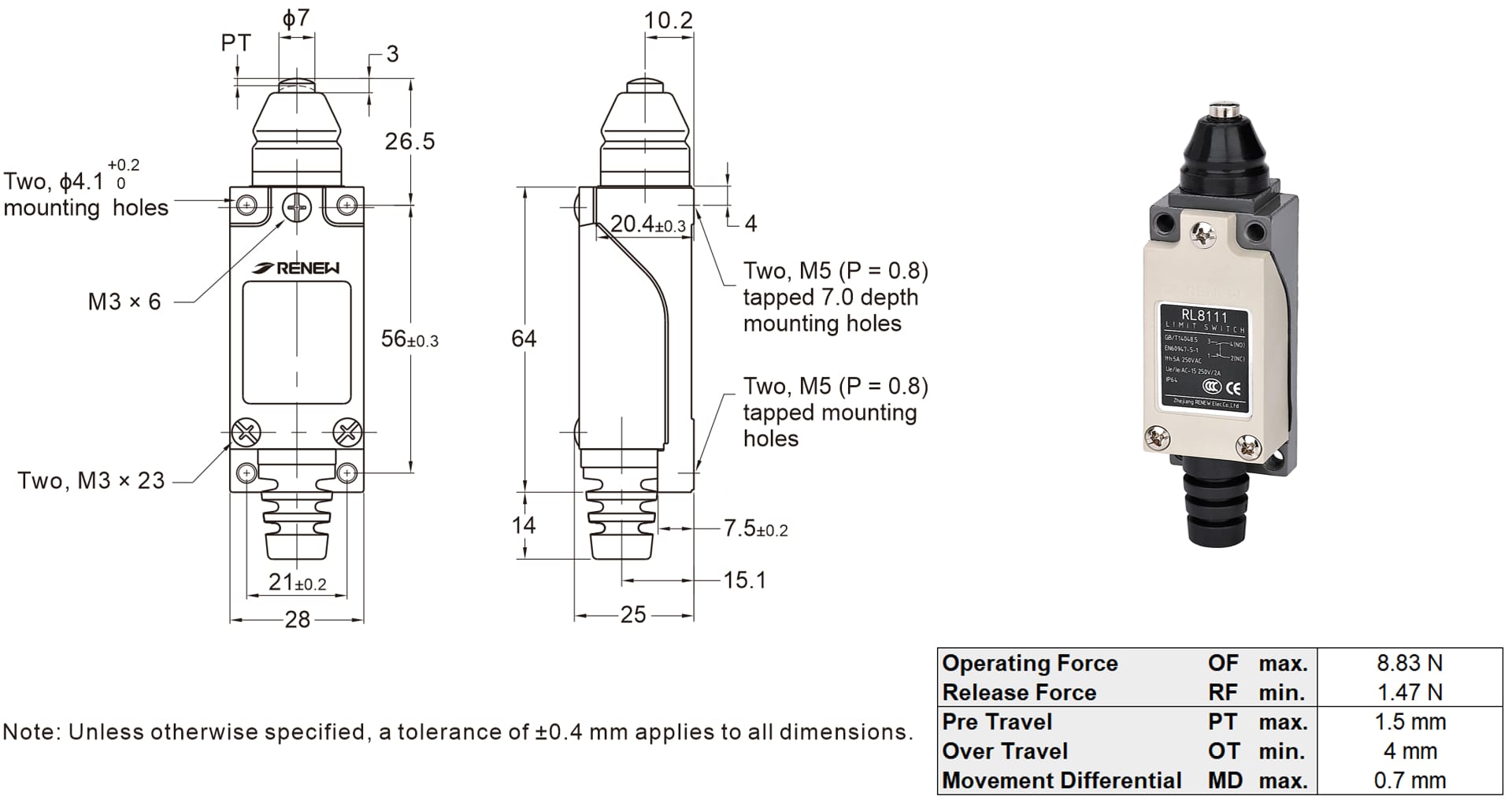
Datos técnicos generales
| Clasificación de amperios | 5 A, 250 VCA |
| Resistencia de aislamiento | 100 MΩ mín. (a 500 VCC) |
| Resistencia de contacto | 25 mΩ máx. (valor inicial) |
| Rigidez dieléctrica | Entre contactos de la misma polaridad 1000 VCA, 50/60 Hz durante 1 min |
| Entre las partes metálicas que conducen corriente y tierra, y entre cada terminal y las partes metálicas que no conducen corriente 2000 VCA, 50/60 Hz durante 1 min | |
| Resistencia a la vibración por mal funcionamiento | 10 a 55 Hz, 1,5 mm de amplitud doble (mal funcionamiento: 1 ms máx.) |
| Vida mecánica | 10.000.000 de operaciones mín. (120 operaciones/min) |
| Vida eléctrica | 300.000 operaciones mín. (bajo la carga de resistencia nominal) |
| Grado de protección | Uso general: IP64 |
Solicitud
Los interruptores de límite en miniatura de Renew desempeñan un papel fundamental para garantizar la seguridad, precisión y fiabilidad de diversos dispositivos en diferentes campos. A continuación, se presentan algunas aplicaciones populares o potenciales.
Robótica y líneas de montaje automatizadas
En robótica, estos interruptores se utilizan para determinar la posición de los brazos robóticos. Por ejemplo, un interruptor de límite de émbolo sellado puede detectar cuándo un brazo robótico llega al final de su recorrido y envía una señal al sistema de control para detener el movimiento o invertir la dirección, garantizando así un control preciso y evitando daños mecánicos.
Categorías de productos
-

Interruptor básico de palanca de bisagra corta
-

Interruptor básico de palanca de rodillo de bisagra corta
-

Émbolo de contacto mantenido / Montaje en panel / Tand...
-

Interruptor básico de palanca de bisagra
-

Interruptor básico en miniatura con émbolo de pasador
-

Interruptor de límite de oscilación de bobina con punta de plástico







