Interruptor de límite horizontal de palanca de bisagra

-

Carcasa robusta
-

Acción confiable
-

Vida mejorada
Descripción del Producto
Los interruptores de límite horizontales de la serie RL7 de Renew están diseñados para una mayor durabilidad y resistencia a entornos hostiles, con una vida útil mecánica de hasta 10 millones de operaciones, lo que los hace ideales para aplicaciones críticas y de servicio pesado donde no se pueden utilizar interruptores básicos convencionales. El interruptor con actuador de palanca articulada ofrece un alcance extendido y flexibilidad de accionamiento, lo que facilita su activación y es perfecto para aplicaciones donde las limitaciones de espacio o los ángulos complicados dificultan el accionamiento directo.
Dimensiones y características de funcionamiento
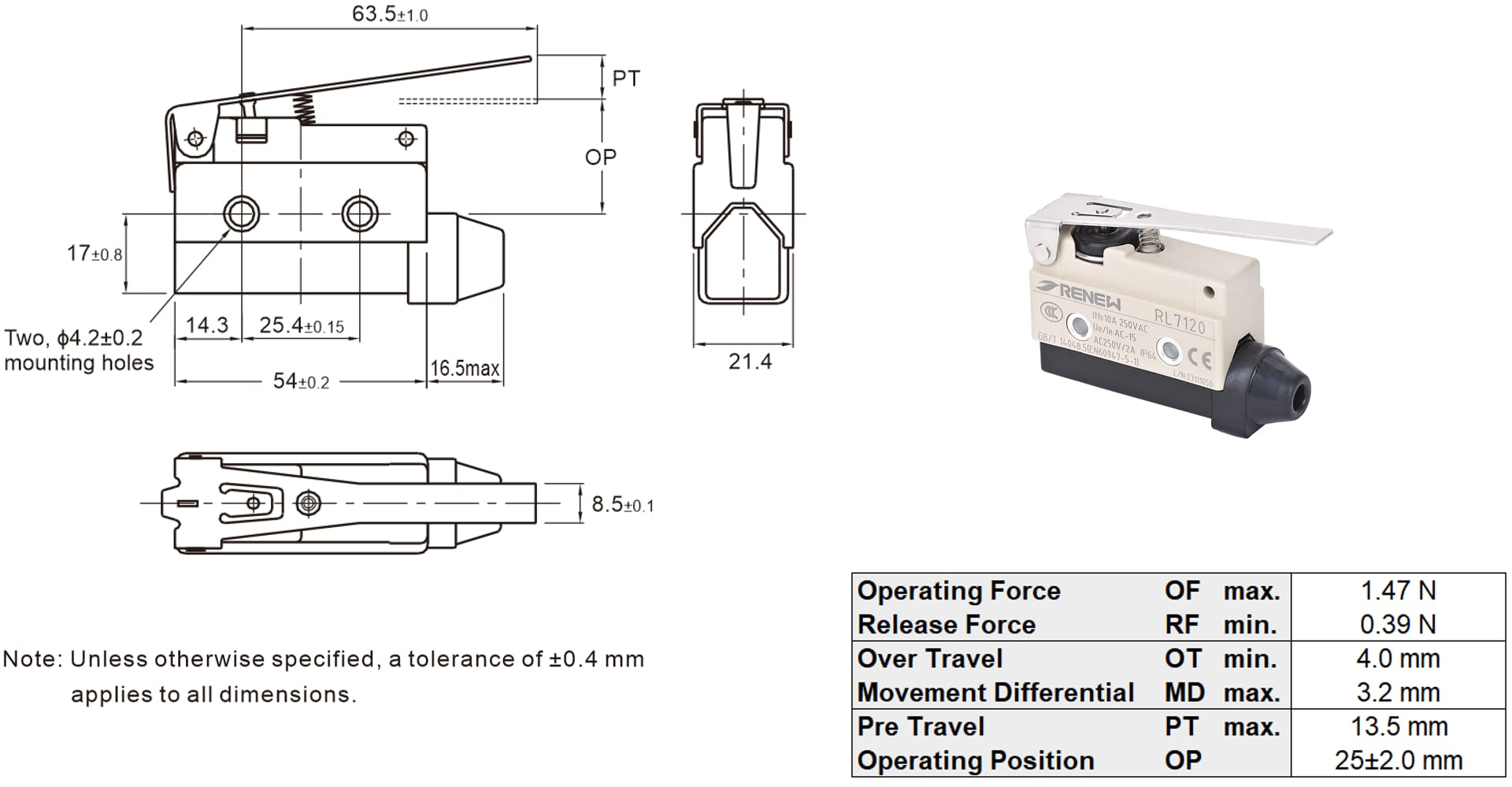
Datos técnicos generales
| Clasificación de amperios | 10 A, 250 VCA |
| Resistencia de aislamiento | 100 MΩ mín. (a 500 VCC) |
| Resistencia de contacto | 15 mΩ máx. (valor inicial del interruptor incorporado cuando se prueba solo) |
| Rigidez dieléctrica | Entre contactos de la misma polaridad 1000 VCA, 50/60 Hz durante 1 min |
| Entre las partes metálicas que conducen corriente y tierra, y entre cada terminal y las partes metálicas que no conducen corriente 2000 VCA, 50/60 Hz durante 1 min | |
| Resistencia a la vibración por mal funcionamiento | 10 a 55 Hz, 1,5 mm de amplitud doble (mal funcionamiento: 1 ms máx.) |
| Vida mecánica | 10.000.000 de operaciones mín. (50 operaciones/min) |
| Vida eléctrica | 200.000 operaciones mín. (bajo la carga de resistencia nominal, 20 operaciones/min) |
| Grado de protección | Uso general: IP64 |
Solicitud
Los interruptores de límite horizontales de Renew desempeñan un papel fundamental para garantizar la seguridad, precisión y fiabilidad de diversos dispositivos en diferentes campos. A continuación, se presentan algunas aplicaciones populares o potenciales.
Brazos robóticos articulados y pinzas
Integrado en las pinzas de la muñeca del brazo robótico para detectar la presión de agarre y evitar la sobreextensión, así como integrado en brazos robóticos articulados para su uso en conjuntos de control y proporcionar guía de final de recorrido y estilo cuadrícula.
Categorías de productos
-

Interruptor básico de émbolo de rodillo para montaje en panel
-

Interruptor de límite horizontal de palanca corta con bisagra
-

Interruptor de límite horizontal de émbolo de resorte corto
-

Interruptor de límite de émbolo de rodillo sellado
-

Interruptor de límite de oscilación de bobina de punta de alambre
-

Interruptor básico de palanca de rodillo de bisagra







